"""
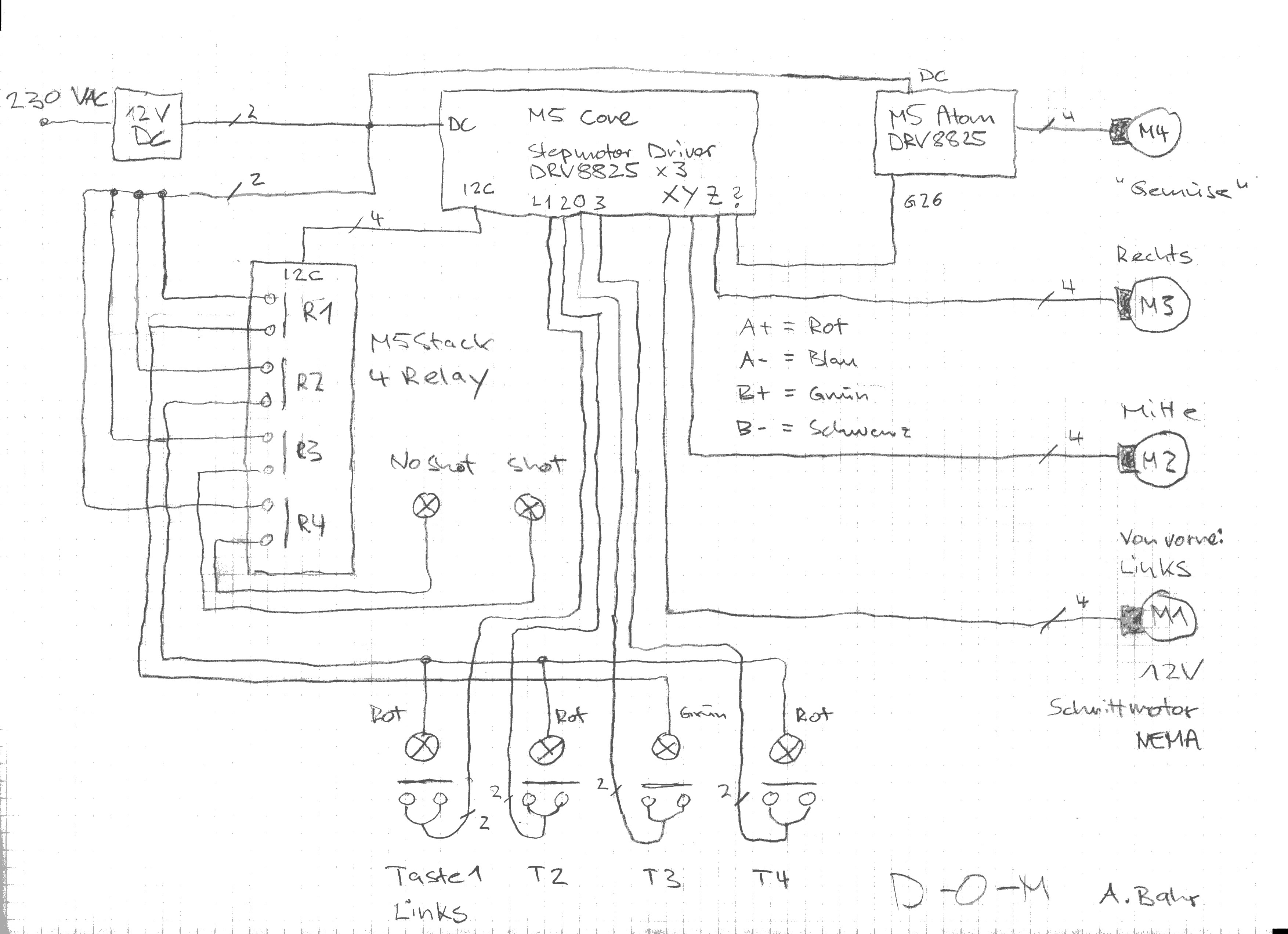
DURST-O-MAT v0.2.3
Target: M5Stack Core
2022 Andreas Bahr
---------------------
Stepmotor Driver 13.2:
X = Left Wheel
L0 = Start Game
L1 = Left Wheel Trigger
-----------------------
4 Relay:
Relay 1: start game button lamp
Relay 2: wheel buttons lamps
"""
from m5stack import *
from m5ui import *
from uiflow import *
import machine
import i2c_bus
import unit
import time
import random
from numbers import Number
# setup:
motorIntMs = 4
# wheels control variables
trigger = False
triggerX = False
triggerY = False
triggerZ = False
wheelX = 0
wheelY = 0
wheelZ = 0
finitoX = None
finitoY = None
finitoZ = None
def blinkGreen(relayBar):
if relayBar.get_relay_status(1):
relayBar.set_relay_status(1, 0) # green lamp OFF
else:
relayBar.set_relay_status(1, 1) # green lamp ON
# display
setScreenColor(0x33cc00)
lcd.font(lcd.FONT_DejaVu18)
lcd.print('Startup...', 0, 0, 0x000000)
# stepmotor driver setup
pin0 = machine.Pin(16, mode=machine.Pin.OUT, pull=0x00) # step X
pin1 = machine.Pin(17, mode=machine.Pin.OUT, pull=0x00) # direction X
pin1.on() # off = turn left, on = turn right
pin2 = machine.Pin(12, mode=machine.Pin.OUT, pull=0x00) # step Y
pin3 = machine.Pin(13, mode=machine.Pin.OUT, pull=0x00) # direction X
pin3.on() # off = turn left, on = turn right
pin4 = machine.Pin(0, mode=machine.Pin.OUT, pull=0x00) # direction Z
pin4.on() # off = turn left, on = turn right
pin4 = machine.Pin(15, mode=machine.Pin.OUT, pull=0x00) # step Z
i2c0 = i2c_bus.easyI2C(i2c_bus.PORTA, 0x00, freq=400000) # port expander
i2c0.addr=(0x27)
i2c0.write_u8(0x03, 0x0F) # config I/O
# relay module setup
relayBar = unit.get(unit.RELAY4, unit.PORTA)
relayBar.set_mode(1)
# loop-o-grande
lcd.clear()
while True:
randomRecipe = ''
lcd.print('DURST-O-MAT v0.2.3', 0, 0, 0x000000)
relayBar.set_relay_status(1, 1) # green lamp ON
relayBar.set_relay_status(2, 1) # red lamps ON
# wait for trigger's
trigger = (~(i2c0.read_u8(0x00) & 0x01) & 0x01)
triggerX = (i2c0.read_u8(0x00) & 0x02) >> 1
triggerX = not triggerX
triggerY = (i2c0.read_u8(0x00) & 0x04) >> 2
triggerY = not triggerY
triggerZ = (i2c0.read_u8(0x00) & 0x08) >> 3
triggerZ = not triggerZ
if (trigger | triggerX | triggerY | triggerZ):
lcd.print('Play Game', 0, 25, 0x000000)
relayBar.set_relay_status(1, 0) # green lamp OFF
relayBar.set_relay_status(2, 0) # red lamps OFF
if trigger:
wheelX = 1800 + (random.randint(0, 7) * 25) - 60
randomRecipe = str(wheelX + 60)
elif triggerX:
wheelX = 1000 + (random.randint(0, 7) * 25)
randomRecipe = str(wheelX) + '-0-0'
if trigger:
wheelY = 2000 + (random.randint(0, 7) * 25) - 30
randomRecipe = randomRecipe + '-' + str(wheelY + 30)
elif triggerY:
wheelY = 1000 + (random.randint(0, 7) * 25)
randomRecipe = '0-' + str(wheelY) + '-0'
if trigger:
wheelZ = 2200 + (random.randint(0, 7) * 25)
randomRecipe = randomRecipe + '-' + str(wheelZ)
elif triggerZ:
wheelZ = 1000 + (random.randint(0, 7) * 25)
randomRecipe = '0-0-' + str(wheelZ)
lcd.print(randomRecipe, 0, 50, 0x000000)
finitoX = False
finitoY = False
finitoZ = False
# switch motors ON
i2c0.write_u8(0x01, 0x00)
wait_ms(200)
# spin up the wheels, 1 by 1, max. 60 steps
if trigger:
for count in range(30):
pin0.on()
wait_ms(motorIntMs)
pin0.off()
wait_ms(motorIntMs)
for count in range(30):
pin0.on()
pin2.on()
wait_ms(motorIntMs)
pin0.off()
pin2.off()
wait_ms(motorIntMs)
# spin the wheels
i = 0
while not (finitoX & finitoY & finitoZ):
if wheelX == 0:
finitoX = True
else:
pin0.on()
wheelX = wheelX - 1
if wheelY == 0:
finitoY = True
else:
pin2.on()
wheelY = wheelY - 1
if wheelZ == 0:
finitoZ = True
else:
pin4.on()
wheelZ = wheelZ - 1
wait_ms(motorIntMs)
pin0.off()
pin2.off()
pin4.off()
wait_ms(motorIntMs)
# green blinkr
if i == 99:
blinkGreen(relayBar)
i = 0
else:
i = i + 1
# hold position
lcd.print('Motors on hold', 0, 75, 0x000000)
wait_ms(2000)
# switch motors OFF
i2c0.write_u8(0x01, 0x10)
lcd.clear()
wait_ms(20)